まえおき
スイッチング周波数(PWM周波数)とトルクの関係について、経験則では
「スイッチング周波数が高いほど低速が効きにくい(車両が低速で走行しない、ラピッドスタートする等々)」
と感じます。
実際、M-9モータ使用のTOMIX製動力車で起動時の線路電圧(起動電圧)を測定した所、スイッチング周波数がおよそ1kHz上がる毎に20mV程度、起動電圧が高くなりました。
(デジタルメータで測定したため、測定値(瞬時値)の正確性にやや疑問が残りますので上記については参考程度に留めて頂きますと幸いです)
では、スイッチング周波数が高いとトルクが減少するのか?
結論から言うと、平均のトルクはスイッチング周波数の影響を受けません。
では、スイッチング周波数が上がるとトルクが落ちる(と感じる)原因は何だろう?となりますよね。
そもそも「トルクが落ちる」とは、
「スイッチング周波数が低い方が、低い平均電圧でモーターが起動する」
という誤った解釈がもとではないか?と考えたことに端を発します。
PWM制御におけるスイッチング周波数とトルクの関係についての考察(新 追加)
2020/10/24追記:以下の新 追加考察全てについて
この追加考察については、NE555,njm555など555タイマーICを使用したPWM回路に限定した話とします。
今回、考察(旧)の検証として「デューティ比が等しいとき、PWM周波数の違いにより動力車の挙動に変化がみられるか」について検証してみました。
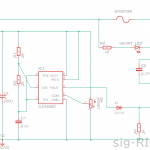
検証には、こちらのページに記載されている、上から5番目の回路を参考にさせて頂きました。
参考にさせて頂いた回路からの主な変更点は、
・使用ICをnjm555に変更
・VR周辺のダイオード2ケを1N4148に変更
・4番、8番ピン周辺にパスコンを追加
・OUT部分に2SK2232のゲートを接続し、MOSFETによってスイッチングするパワーパックを構成
・VRは複数の抵抗を直列に接続して代用
555を用いたPWM回路の場合、コンデンサの容量を変更することで発振周波数を変えることができます。
今回は約170Hz、約2.9kHz、約20kHzと3つの周波数で実験を行いました。
結果だけ述べると、デューティ比が等しいとき、3つのPWM周波数において車両の速度と線路電圧(≒モーターの端子間電圧)がほぼ一致しました。
なおデューティ比は35%、99.9%としてそれぞれ測定しました。
本来は5%など低速時のデューティ比で検証しなければ意味がないのですが、精度が期待できないミニオシロしか所持していないためデューティー比を正確に測定できず断念しました。
そのため今回の実験は当ページ下部にある旧考察の証明または反証とは成り得ませんでした。
しかし、本実験により可変抵抗VRの変化に対するデューティ比の変化の割合が、設定したPWM周波数によって異なることが判明しました。
今回、VR(1MΩ)は複数の直列抵抗で等価としています。各直列抵抗の任意の結線部に可変部分と見立てた導線を結線することで、VRの変動を離散的かつ定性的に評価できるようになります。
(1MのVRが手元になかったのがもともとの理由でしたが)
その結果、555を用いたPWM回路の場合、PWM周波数が高くなるほど可変抵抗VRの変化に対するデューティ比の変化は可変抵抗でいうCカーブ的な形となり、逆にPWM周波数が低くなるほど可変抵抗VRの変化に対するデューティ比の変化はAカーブ的な形となることが確認できました。
今回の議論の対象はパワーパックです。パワーパックの操作部ですから、普通は周波数に関わらずBカーブの可変抵抗を用いるでしょう。
しかし、もしBカーブの可変抵抗を用いたとすると、上記の理由から実際のデューティ比の変化はたいてい非線形になると予想されます。
特に市販されているパワーパック(パワーユニット)のPWM周波数は20kHzや100kHzなどであり、それらに近いPWM周波数でパワーパックを設計すると可変抵抗VRの変化に対するデューティ比の変化は可変抵抗でいうCカーブ的な形を取ると予想されます。
「Bカーブの可変抵抗を用いているのだから、デューティ比の変化は線形であるだろう」という予想に反する結果となります。
以上から、特に自作パワーパックで「PWM周波数を上げると低速が効きにくい」と感じる理由は、可変抵抗VRの変化に対するデューティ比の変化が非線形(しかも低速部分(=デューティ比が低い部分)が急峻に変化するから、低速で走らせるように調整するのが困難)であることによる、感覚との乖離が理由の可能性が高いと考えられます。これが事実なら、音量にAカーブが使われる理由と同一ってことになりますね。
しかし、PWM周波数を上げると低速部分が実際急峻に変化するので、「PWM周波数を上げると低速が効きにくい」というのは間違いとも言いずらいかも。少なくとも超低速の調整をし辛いことは間違いないので……。
KATOのパワーパックSXの動作周波数は100kHz程度であるのに低速が効きやすいという評価が多い(らしい)のも、使用されている可変抵抗がAカーブっぽい(らしい)であるからと説明できます。(「らしい」ばっかりですが持っていないのでしょうがない)
PWM周波数が低いと音鳴りはするし電力損失も増えるし、と悪いことばかりです。
なので、敢えて励磁音を出すとかしない限り、周波数はそれなりに高くしておきましょう。まあ精々40kHz位で良いとは思いますが……
また、この事象に対する対策としてはAカーブの可変抵抗を使う、低速制御用のボリュームを分けて実装する、等が挙げられます。
長々と書きましたが、結論としてまとめると「とりあえず、Aカーブを試してみろ」って所でしょうか。
自作する方は騙されたと思って一度お試しください。私はこれからパワーパックのボリュームには全部Aカーブを使うつもりです。
以下、旧考察です。
PWM制御におけるスイッチング周波数とトルクの関係についての考察(旧)
2020/10/24追記:以下の考察は間違っている気がしますが、あくまで考察なのでそのまま残しておくことにしました。以下の考察について補強する資料がありました。素人ですので細かい説明にミスがある可能性はありますが、以下の考察の結論はおそらく正しいと考えられます。
以下から筆者の考察です。
スイッチング周波数が上がるとトルクが落ちる(と感じる)原因は、スイッチング周波数が上がると電流の最大値が下がるためではないかと考えています。
PWMもPFMもその制御方式故に電圧が一定ではありませんので、電流も当然ですが一定にはなりません。モーターのインダクタンスを考慮する必要があります。
(スイッチング周波数と過渡電流の関係は、キヤノンプレシジョン様のサイト(こちら)にグラフがあります)
上記のサイトを見て頂くと分かりますが、スイッチング周波数が低い場合は電流の最大値が大きくなります。
また直流モーターのトルクは電流に比例しますので、電流の最大値が大きくなれば最大トルクも大きくなりますし、その逆に電流の最大値が小さくなれ最大トルクも小さくなります。
(ただし、過渡電流の振幅が大きいと損失も大きくなります。急加速・急減速の運転は燃費が悪いのと似たような理由です。要はエコではない)
2020/10/24追記:
”わざとリップルを大きくし電流ピークの最大値を上げトルクを大きくするような使用方法もあります。”
(rohm社様の「モータの電気的時定数に対して十分に小さいPWM周期について」(こちら)より引用)
リップルとは損失のことです。実際にスイッチング周波数を下げることで電流の最大値を引き上げ、トルクを大きくする場合もあることが上記の資料より分かります。
以上からスイッチング周波数とトルクについてまとめると、
「スイッチング周波数と最大トルクは反比例する」
と言えます。
(DCモータの特性についての詳細はrohm社様のページ(こちら)を参考にしました)
ここまででスイッチング周波数とトルクの関係が分かりましたので、もう1つの要素、摩擦力について考えます。
車両が動きだすのは、トルク(を車輪の半径で割った値)が最大静止摩擦力を超えた「瞬間」です。最大トルクが最大静止摩擦力を超えれば、車両が一瞬動きます。
さらに、鉄道模型は静止摩擦力と動摩擦力の差が大きいと考えられます(計測はしていませんが)。車両が動き出した後に速度を下げても、車両が動き続ける場合が多々あることがその理由です。
特にフライホイール付きの車両である場合は、フライホイールの効果も加わり、低速でも安定して動きます。
以上からトルクと摩擦力についてまとめると、
「最大トルクが最大静止摩擦力を一瞬でも超えれば、トルクが動摩擦力を下回らない限り車両が動き続ける」
と言えます。
最後に、上記の2項目についてまとめます。
まず、スイッチング周波数と最大トルクは反比例します。つまり、平均のトルクと最大トルクの差が小さくなります。
ここで、車両が動き出す瞬間とは「最大トルクで最大静止摩擦力を超えた瞬間」でした。
平均のトルクと最大トルクの差が小さくなるということは、最大トルクで最大静止摩擦力を超えるために、より高い平均電圧を必要とすると言えます。
以上から、結論として
「スイッチング周波数が高くなると、より高い平均電圧でなければ車両が始動しない」
と考えることができます。
平均電圧が高いため、当然、車両のラピッドスタートが起こります。
平均のトルクはスイッチング周波数に関わらず等しいはずなのに、「スイッチング周波数が高いと低速が効かない(=動き出しが悪い)」と感じるのは、このためではないでしょうか。